Dr. Eva de Hullu, Open Universiteit
Introductie
In 1973 publiceerde William T. Powers, psycholoog en ingenieur, het boek “Behavior: the Control of Perception”, waarin hij een theorie heeft uitgewerkt die duidelijk maakt hoe mensen en alle levende wezens functioneren: de Perceptual Control Theory. Deze theorie is sindsdien door Powers en vele andere onderzoekers verder uitgewerkt (Mansell & Carey, 2013; Powers, 2009) en kan een revolutie teweegbrengen in de psychologie (Mansell & Carey, 2015), omdat ze de gangbare theorieën zoals cognitieve theorieën en behavioristische theorieën qua verklaringskracht overtreft (Bourbon & Powers, 1999; Mansell, Curtis, & Zink, 2019).
Deze revolutie in de psychologie lijkt noodzakelijk: er is sprake van crisis op meerdere terreinen. De replicatiecrisis maakt duidelijk dat het bewijs van veel wetenschappelijke studies niet standhoudt als het onderzoek herhaald wordt (Yong, 2012). In de behandeling van bijvoorbeeld depressie is men met het huidige therapieaanbod slechts bij een klein deel van de patiënten in staat het leed te verzachten (Cuijpers, Karyotaki, Reijnders, & Ebert, 2019). Er zijn duizenden behandelmethoden, maar de één lijkt niet effectiever dan de andere (het Dodo bird verdict; Luborsky e.a., 2002). Vanuit verschillende kanten klinkt de roep om een betere theorie (Hofmann & Hayes, 2019): als we begrijpen hoe mensen werken, kunnen we werken aan een betere psychologie.
In dit artikel geef ik een introductie op de Perceptual Control Theory, een theorie die je zonder vrees kan onderwerpen aan de strengste wetenschappelijke toets (Mansell & Huddy, 2018), waarmee je natuurgetrouwe robotmodellen kan bouwen die zich net zo gedragen als mensen (Young, 2017) en een theorie die je kijk op hoe mensen en andere levende organismen functioneren radicaal kan veranderen (Forssell, 2016).
Huidige theorieën in de Psychologie: Leertheorie en Cognitieve theorie
In de praktijk denk je waarschijnlijk niet vaak aan de theorieën die nu heersend zijn in de psychologie. Er zijn onderwerpen waar je veel van begrijpt en onderwerpen waar je weinig van begrijpt. Je merkt wat werkt en doet dat vaker; je merkt wat niet werkt en laat dat achterwege.
Vanaf een afstand is echter duidelijk dat de cognitieve theorie en de leertheorie, die in de psychologie heersend zijn, overal terugkomen. Je hoort het als iemand het heeft over hoe gedrag ‘getriggerd’ wordt in een bepaalde situatie, hoe muziek automatisch gevoelens en emoties ‘opwekt’, hoe de informatie die je binnenkrijgt in je hersenen ‘verwerkt’ wordt en daarmee leidt tot bepaald gedrag. Je ziet het terug in systemen van straf en beloning, in krantenartikelen over vertekeningen in onze informatieverwerking en hoe deze je gedrag bepalen. De cognitieve gedragstherapie, de heersende therapiestroming in Nederland, gaat uit van deze twee fundamentele theorieën in de psychologie en onderbouwt daarmee haar behandelaanbod.
Om te laten zien waarin deze twee theorieën en de Perceptual Control Theory verschillen, begin ik met een voorbeeld van een alledaagse situatie.
Om naar je werk te komen in een nabijgelegen stad stap je elke ochtend in je auto. Je rijdt dagelijks een min of meer vaste route over provinciale wegen. Of de zon schijnt, of het regent, of sneeuwt: je komt elke keer iets voor 9.00 uur binnen op kantoor.
Nu rijd je in je auto met een snelheid van ongeveer 80 km per uur op de provinciale weg, onderweg van huis naar je werk. Door je voorruit kijk je vooruit, je ziet de witte strepen midden op de weg, de doorgetrokken lijn rechts van je, de berm. Je voet drukt lichtjes op het gaspedaal, je hebt twee handen aan het stuur.
Wat doe je hier?
Gedrag kun je verklaren vanuit de leertheorie doordat het ofwel een respons is op een bepaalde stimulus in de omgeving (klassieke conditionering), of dat het is aangeleerd doordat het gedrag in het verleden is bekrachtigd (operante conditionering). Gedrag dat je hielp een beloning te verwerven of straf te voorkomen, blijft bestaan. Gedrag wordt daarmee bepaald door factoren uit de omgeving, en niet door factoren binnen de persoon. Als je het bordje ziet met de maximumsnelheid van 80 km per uur, reageer je door 80 km per uur te rijden. Je drukt op het gaspedaal, want je hebt geleerd dat het drukken op het gaspedaal je helpt om de juiste snelheid te behouden. Je behoudt de juiste snelheid om ongelukken of een verkeersboete te voorkomen. Je draait aan het stuur om ervoor te zorgen dat je auto niet van de weg afraakt.
In de cognitieve theorie gaat men er vanuit dat gedrag gestuurd wordt door de informatieverwerking. Informatie uit de omgeving wordt verwerkt in het organisme, omgezet in een bepaald plan voor handeling, dat vervolgens wordt uitgevoerd. Een cognitieve visie op wat je hier doet, gaat er van uit dat gedrag volgt op cognitie: je hebt een plan (een gedachte) om van je huis naar je werk te komen. Dat plan bestaat uit een aantal stappen, die je achtereenvolgens uitvoert. Je hebt de auto gestart, je bent de weg opgereden, en nu voer je het programma “rijden op de provinciale weg” uit volgens plan.
Deze twee verklaringen staan model voor de gangbare psychologie, waarin meestal de cognitieve theorie en leertheorieën worden gecombineerd om gedrag (zoals het rijden op de weg) te verklaren. Als je echter werkelijk wil begrijpen hoe het kan dat je op de weg rijdt en blijft rijden, zonder in de berm te belanden, dan geven deze verklaringen je geen stevige basis. Hoe verklaar je dat het goed gaat?
Als je met de auto een dijkweg oprijdt, blijkt het flink te waaien. De auto wordt door de wind naar de middenstreep geduwd. Je stuurt bij om te zorgen dat je op je eigen weghelft blijft.
Wat gebeurt hier?
De leertheorie vertelt je dat je hebt geleerd om voor zijwind te compenseren door bij te sturen. In reactie op wind van rechts, draai je het stuur naar rechts. Zo voorkom je ongelukken.
De cognitieve theorie vertelt je dat je in deze situatie een plan moet uitvoeren om recht op de weg te blijven, waarbij je de kracht van de wind moet compenseren met je stuurbewegingen.
Ik zou niet graag naast je in de auto zitten, als je echt zo werkte. Wat als je nog nooit eerder zijwind van rechts had meegemaakt en nog niet had geleerd hiervoor te compenseren? Wat als je moe was en je te slordig berekende hoeveel je precies moest bijsturen om op de weg te blijven? Ik zie ons al de weg over slingeren en van de dijk af storten.
Kennelijk zijn de verklaringen van leertheorie en cognitieve theorie niet volledig, want de hele dag lang rijden er mensen over de weg zonder in de berm te belanden. Er is onverwachte zijwind van links en van rechts, er remt een auto voor je plotseling, er ligt een tak op de weg en toch kom je veilig aan op je werk. Ik stap zonder twijfel bij je in de auto. Hoe kan dat?Om te kunnen begrijpen hoe het kan dat we elke autorit overleven, hebben we meer aan een theorie die duidelijk maakt hoe het je lukt om de auto op de weg te houden.
Een geheel andere theorie: Perceptual Control Theory
Vanuit de Perceptual Control Theory bekeken, ben je als bestuurder van de auto bezig met het controleren van je perceptie. Alles wat er via je zintuigen binnenkomt en wat je waarneemt, bewust of onbewust, wat je ervaart, is perceptie. Als ik in de verte een stoplicht zie, dan is dat mijn perceptie. Als ik door het open raam de wind voel tegen mijn huid, is dat mijn perceptie.
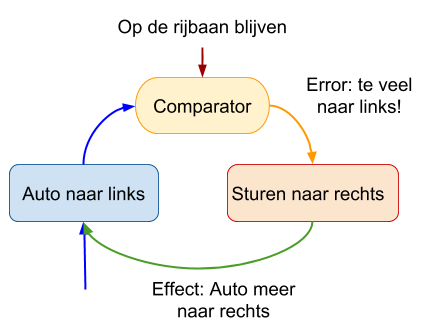
Alles wat je doet is erop gericht om je perceptie, je ervaring, in lijn te brengen met wat je wil ervaren: dat is de basis van PCT. Je doel als bestuurder is de auto op je eigen rijbaan te houden, met de snelheid die past bij de wegsituatie, op veilige afstand van andere auto’s, met als uiteindelijk doel op je werk te komen. Je bent continu bezig om ervoor te zorgen dat wat je ervaart (je perceptie van de auto midden op je eigen weghelft, wat je door je voorruit ziet) zo te krijgen als je zou willen hoe het is (de auto midden op je eigen weghelft). Dit is een continu proces: als je perceptie afwijkt van hoe het zou moeten zijn, dan zorg je ervoor dat je bijstuurt, remt, op het gaspedaal trapt, totdat je perceptie klopt. Als je op de dijk merkt dat de auto naar de middenstreep beweegt, dan stuur je bij. Je hoeft niet eens door te hebben dat er wind is, het is deel van een continu proces van controle. Het bovenstaande zal voor veel mensen logisch in de oren klinken: ja, zo zou het best eens kunnen werken. En toch zijn de uitgangspunten van PCT radicaal anders dan we gewend zijn te denken.
Gedrag is de controle van perceptie
Vanuit Perceptual Control Theory is gedrag de controle van perceptie. Alles wat we sturen en het enige dat we kunnen sturen is perceptie. Het enige waar we invloed op hebben en sturen is dus niet ons gedrag maar onze perceptie. Die perceptie veranderen we via ons gedrag.

Perceptual Control Theory gaat uit van circulaire causaliteit: alleen op die manier kun je ervoor zorgen dat er een continu proces is waarin de perceptie wordt bijgestuurd. Je maakt niet eerst een plan om te sturen, om het vervolgens uit te voeren, zoals in een lineair causaal model, en zoals vanuit de cognitieve theorie. Het sturen gebeurt gelijktijdig met het waarnemen dat je perceptie niet klopt met hoe je het wil hebben.
Deze gelijktijdigheid wordt mogelijk gemaakt doordat er een feedback-loop is. Er is meteen feedback van je handeling op je perceptie – de perceptie verandert mét dat je handelt. Traditionele psychologische theorieën gaan uit van lineaire causaliteit: er is eerst cognitie, dan actie. Er is eerst gedrag, dan een consequentie van dat gedrag. PCT gaat uit van een circulaire causaliteit, waarin gedrag en perceptie altijd met elkaar verbonden zijn via een feedback-loop. Er is geen begin en geen einde.
De feedback-loop
Om beter te begrijpen hoe een feedback-loop werkt, kunnen we kennis gebruiken uit de elektrotechniek: we moeten in de basis begrijpen hoe een controlesysteem met negatieve feedback, een regelkring, werkt.
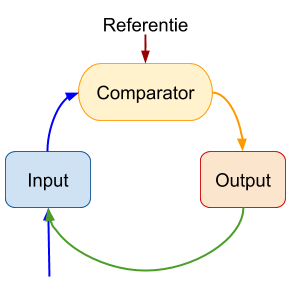
Een basale feedback-loop ziet er uit als in figuur 1a. Er is een referentiewaarde, de gewenste toestand, de verwachte toestand, het doel: zo moet het zijn. De input is je perceptie van de huidige toestand, je waarneming van hoe het nu is. De input en de referentie worden met elkaar vergeleken in de comparator-functie. Het verschil tussen de referentiewaarde (hoe je wil dat het is) en de input-waarde (hoe het is), is een error-signaal. Dit signaal geeft in de output-functie aan hoeveel actie er nodig is om het verschil tussen input en referentie te laten verdwijnen. Dit heet negatieve feedback – de feedback vermindert de error. Vanuit de output-functie loopt een signaal terug naar de input-functie: de actie vanuit de output verandert de input, de perceptie.
Controle
Wat is nu controle, in deze controle-loop? Controle vindt plaats in het geheel: door de negatieve feedback (die de error vermindert) komt de waarde van de perceptuele input dichter bij de referentiewaarde. Deze controlefunctie zorgt ervoor dat je continu invloed hebt op de wereld, invloed hebt op je perceptie en je perceptie van hoe de wereld is aanpast aan hoe je wilt dat de wereld is. Controle vindt dus plaats ín de loop, via een continue cirkel van perceptie-vergelijken-handelen. Controle is wat we doen, wat alle levende wezens voortdurend doen zolang ze leven. Je merkt de controle niet op, tenzij je geen controle hebt.
Controle is er in principe altijd – een levend wezen bevindt zich in een wereld die continu verandert. Je hebt controle over ontelbaar veel variabelen, in ons voorbeeld onder andere de positie van de auto op de weg, je snelheid ten opzichte van andere auto’s, hoe het geluid van je motor klinkt, het volume van de autoradio, de bekende route naar je werk. Op een dag dat het regent, rijd je anders dan op een zonnige dag. Daar hoef je geen apart plan voor uit de kast te trekken; controle zorgt ervoor dat je je doel bereikt.
In de omgeving, met al die variabelen die je controleert, verandert vaak iets, verwacht of onverwacht. Een auto voor je remt plotseling – de afstand tot jouw auto wordt snel kleiner. Er is error, je remt ook. Jouw auto staat ook stil, het is veilig. Een verstoring zoals de remmende auto voor je (een stimulus, in de psychologie), levert geen probleem op zolang je de mogelijkheid hebt om die verstoring op te merken en te handelen. De error die ontstaat wordt ongemerkt verminderd door de handeling die je uitvoert.
Op een moment dat het niet om een beetje zijwind gaat, maar om een rukwind die je auto onverwacht en voluit meesleept, dan zul je merken dat je geen controle hebt. Het maakt niet uit wat je doet met je stuur, je auto wordt meegesleept door de wind. Op het moment dat je geen perceptie hebt van de variabele die je controleert (er waait een deken op je voorruit) of dat je handelingen geen effect hebben op de variabele die je wil controleren (sturen helpt niet), is er geen sprake van controle: je bent machteloos. Vanuit jezelf gezien voelt dat waarschijnlijk als een schok, angst, paniek.
Er is dus de hele tijd controle, over alle variabelen die belangrijk voor ons zijn en die we kunnen waarnemen. Een situatie zoals een rukwind zorgt ervoor dat je tijdelijk geen controle hebt; de controle wordt pas weer hersteld als je weer invloed kunt hebben op de omgeving, wanneer het draaien aan het stuur je auto weer in de goede richting krijgt. Er zijn ook andere situaties waarin controle wegvalt of dat er maar weinig controle is: als er sprake is van een conflict.
Hiërarchie van percepties
Een conflict is een situatie waarin één gecontroleerde variabele twee verschillende referentiewaarden doorkrijgt, waardoor controle binnen één systeem een verlies van controle in het andere systeem betekent. Om te begrijpen hoe dat kan gebeuren, moet je begrijpen hoe we als levend wezen zijn opgebouwd uit een hiërarchie van controlesystemen. Het eenvoudige model van hierboven, is slechts één systeem in een stelsel van systemen. De referentiewaarde die een systeem krijgt, is de output van een bovenliggend systeem (de rode lijnen in figuur 2). Hoe hard je rijdt op de weg, wordt onder andere bepaald door het principe dat je hanteert om je aan de wet te houden. Je aan de wet houden betekent dat je 80 km per uur rijdt. De input van een systeem (de blauwe lijnen) gaat via de onderkant van de hiërarchie naar boven. Op de scheidslijn tussen persoon en omgeving (op het onderste niveau) zie je dat er feedback is: je handelingen (output) hebben effect op de omgeving (de groene lijnen). Je ervaart via je sensoren, je zintuigen (het onderste niveau) de informatie uit de buitenwereld. Dit beeld komt binnen op je netvlies, en wordt in de hersenen uitgebouwd in verschillende lagen in je hiërarchie van controlesystemen, tot het beeld dat je kan interpreteren als ‘midden op de weg rijden’. Op die manier houden we dus continu in de gaten of het beeld dat we ervaren op dit moment, klopt met het beeld dat we willen hebben.
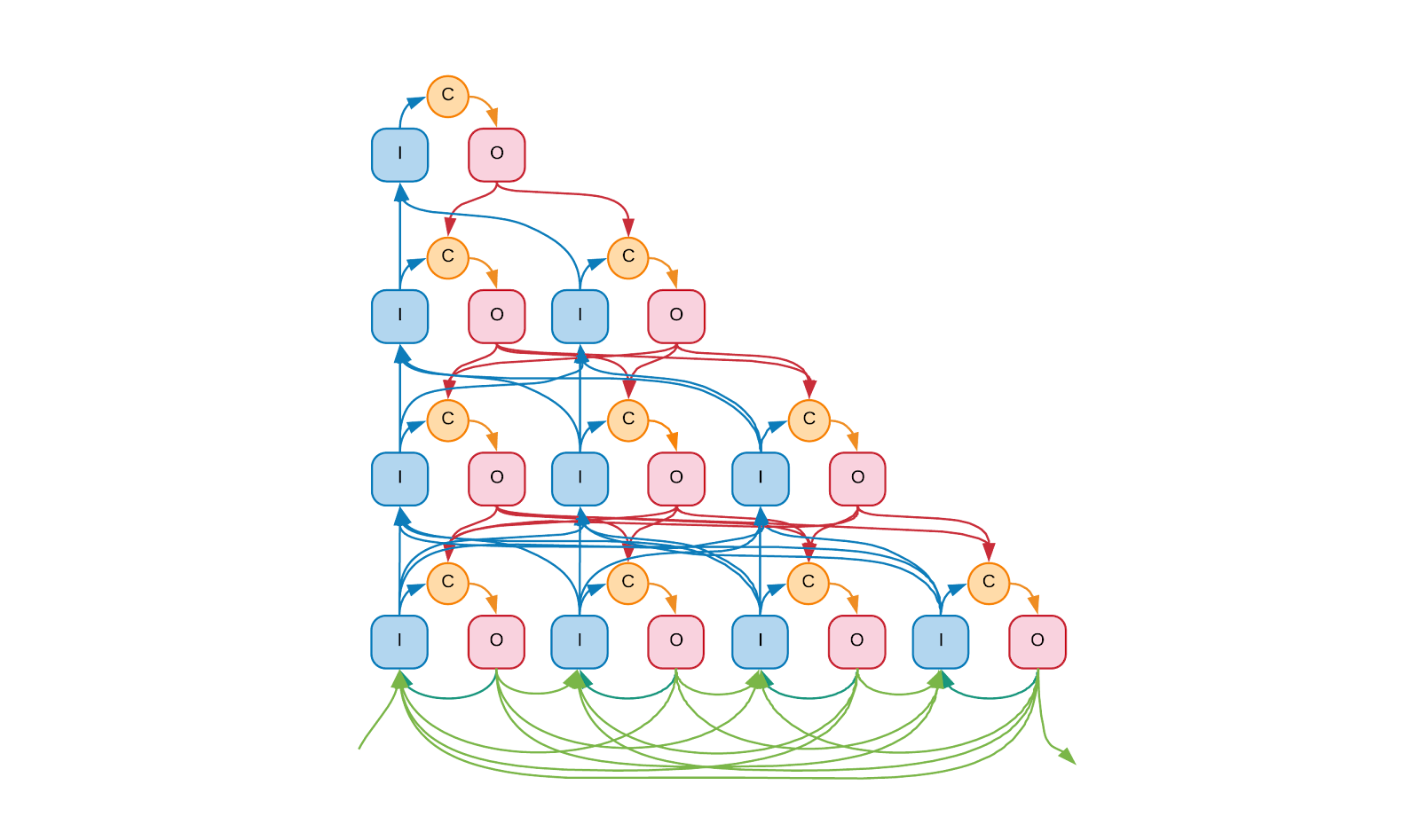
In figuur 2 is te zien hoe elk controlesysteem de referentiewaarden (de rode lijnen) krijgt van controlesystemen hogerop in de hiërarchie. Een snel gemaakte fout bij deze figuur, is denken dat het bovenste systeem alle onderliggende systemen aanstuurt, dat het de commando’s uitdeelt: zorg ervoor dat het zo wordt. Als je zo denkt, dan trap je al snel in de valkuil van de lineaire causaliteit: eerst het ene, dan het ander. Vanuit een circulair causaal model zijn alle lagen in de hiërarchie onderdeel van elkaar. Elk level, elke rij in de hiërarchie, representeert een bepaalde codering van percepties.
Hier wordt de theorie ingewikkelder dan in een kort stuk uit te leggen is; voor een volledige beschrijving verwijzen we naar o.a. Powers (1973) en Runkel (2003). Daarin wordt beschreven hoe het neurale (analoge) signaal vanuit de zenuwuiteinden op het laagste niveau, waar het signaal niet meer is dan een intensiteit (laag-hoog), in elk volgend niveau in toenemende complexiteit van combinaties wordt herschikt. Van intensiteiten (level 1) naar sensaties (level 2), naar configuraties (level 3), transities (level 4), gebeurtenissen (level 5), relaties (level 6), categorieën (level 7), sequenties (level 8), programma’s (level 9), principes (level 10) naar systeemconcepten (level 11). De percepties waar we het steeds over hebben, bevinden zich op een bepaald niveau in de hiërarchie. De afstand tot de auto voor je, is een perceptie op niveau 6, de relatie ten opzichte van de andere auto. Het hogere doel dat je met de autorit wil bereiken, is naar je werk gaan (level 9, programma). Je gaat naar je werk, omdat je geld verdient waarmee je voor jezelf kan zorgen (level 10, principe). Om naar je werk te gaan, moet je in de auto stappen, de sleutel omdraaien, starten, wegrijden (level 8, sequentie).
Wanneer je je verdiept in deze niveaus, zul je zien dat elk niveau is opgebouwd uit een set van de onderliggende niveaus. Een programma bestaat uit meerdere sequenties. Een principe laat je kiezen uit meerdere programma’s. In de onderstaande tabel 1 wordt deze hiërarchie toegelicht.
| Perceptual Level | Perceptie op dit niveau | Voorbeelden | Ervaring van controle |
| 11.System concepts | Coherente organisatie van principes | wereldbeeld, persoonlijkheid, identiteit | Perceptie van zijn Dit is wie ik ben Dit is de waarheid Dit is hoe het werkt |
| 10. Principles | Fundamentele regels, waarden, waarheden, overtuigingen | Doe geen kwaad Bescherm de natuur Zorg voor jezelf | Perceptie van kwaliteit Evaluatie van waarde Dit is belangrijk. Dit is wat ik wil |
| 9. Programs | Structuur van tests en keuzepunten over sequenties. | Volg een recept Bedenk een plan Maak een keuze Een paragraaf | Perceptie van keuze Dit is wat ik doe Dit is mijn keuze |
| 8. Sequences | Percepties met een vaste volgorde in tijd of plaats | Een melodie Een route Een zin | Perceptie van volgorde Voorspelbaarheid Oriëntatie in ruimte en tijd |
| 7. Categories | Indelen van percepties die eigenschappen delen | Katten, vogels, voedsel, mensen, dieren. | Perceptie van onderscheid Weten wat iets is |
| 6. Relationships | Hoe percepties met elkaar samenhangen | De smaak van koffie met de gedronken koffie. De mok staat op de tafel. | Perceptie van relatie Weten hoe het verbonden is in ruimte, tijd, proces Oorzaak en gevolg |
| 5. Events | Een samenhangend patroon van kortdurende percepties van onderliggende niveaus. | Een woord Een slok koffie Een deur openen | Er gebeurt iets Weten dat er iets gebeurt |
| 4. Transitions | Bewegende, veranderende configuraties | Tijd Beweging Verandering | Perceptie van verandering Ervaring van verloop van tijd, processen, beweging |
| 3. Configurations | Bepaalde configuratie van sensaties | Objecten Stoel Emoties | Perceptie van orde Ervaring van patronen, vormen |
| 2. Sensations | Samengestelde zintuiglijke informatie | De smaak van limonade (zoet & zuur tegelijk) Gevoelens | Perceptie van sensatie voelen |
| 1. Intensities | Intensiteit van sensorische informatie | Spierspanning, luidheid van geluid Warmte, kou | Perceptie van magnitude, sterkte Ervaring van contact met buitenwereld |
Tabel 1. Hiërarchische controle van percepties. Samengesteld en uitgewerkt door Eva de Hullu (2019) met gebruikmaking van Powers, W. T. (1973, 2005). Behavior: The control of perception. Benchmark Publications; Powers, W. T. (1998). Making sense of behavior. Benchmark Publications; Runkel, P. J. (2003). People as Living Things: The Psychology of Perceptual Control. Living Control Systems Publishing; Marken, R. S. (2002). More mind readings: Methods and models in the study of purpose. New View Publications.
Conflict
Een gecontroleerde variabele uit ons voorbeeld is de snelheid waarmee je rijdt. Op de provinciale weg mag je 80 km per uur rijden, anders overtreed je de wet. Maar je bent vanochtend te laat vertrokken en met dit tempo zul je te laat komen op je werk. Om op tijd te komen, moet je harder rijden. Dit is een voorbeeld van een conflict: je kunt je aan de wet houden (referentiewaarde 80 km per uur), of je kunt op tijd komen (referentiewaarde: 100 km per uur). Het is niet mogelijk het ene te kiezen, zonder het andere te verliezen. Dit conflict vindt plaats op het niveau van de principes: je aan de wet houden of op tijd komen.
Op het moment dat een controlesysteem (een levend wezen, in dit artikel een mens) een conflict ervaart, is er error die niet wordt opgelost door het gelijktijdig handelen. Zodra je immers te hard rijdt, geeft het controlesysteem dat bewaakt dat je je aan de wet houdt (een principe) een errorsignaal: gedraag je! Zodra je je snelheid matigt, geeft het controlesysteem dat bewaakt dat je op tijd komt een errorsignaal: haast je! Dit conflict, deze chronische error, is voelbaar als stress. Er is onrust, geen evenwicht en tijdelijk geen controle over de snelheid. Je gedraagt je irrationeel (dan weer hard rijden, dan weer rustig aan) of je rijdt op een tussenliggende, niet gewenste snelheid (90 km per uur, te langzaam om op tijd te komen en hard genoeg om een boete te krijgen).
Reorganisatie
Hier komt het laatste belangrijke aspect van de PCT dat ik wil introduceren aan bod: reorganisatie. Een levend controlesysteem onderscheidt zich van een mechanisch controlesysteem (bijvoorbeeld de thermostaat in je huis, de cruise-control van je auto) door de mogelijkheid om zelf de referentiewaarden aan te passen. Dit gebeurt in een proces van reorganisatie: de parameters van de input en output worden aangepast, zodat de error kan verdwijnen. Die reorganisatie is in hoge mate random: als het niet-random was, dan zou je het zelf al hebben opgelost. Er is een nieuwe ordening nodig die ervoor zorgt dat de controle weer terugkomt.
Het reorganisatiesysteem is een systeem in onze eigen interne organisatie, dat op gang komt op het moment dat er sprake is van chronische error. Die error – voelbaar als stress, pijn, onrust, ongemak -, trekt de aandacht. Je wordt je bewust dat er iets mis is: zo gaat het niet lekker. Óf je komt te laat, óf je rijdt te hard. Nu moet je kiezen. In dat moment van aandacht, kunnen er nieuwe referentiewaarden worden gegenereerd op het niveau waarop de controlesystemen waar het conflict plaatsvindt worden aangestuurd. De reorganisatie, het steeds genereren van nieuwe referentiepercepties, gaat door totdat er een waarde is waarin het conflict is verdwenen. Het kan zijn dat je bedenkt dat veiligheid op de weg belangrijker is dan dat jij precies op tijd achter je computer zit. Die nieuwe waarde zorgt ervoor dat het houden aan de wet voorrang krijgt en te laat komen geen probleem meer is. Het kan ook zijn dat je bedenkt dat als iedereen in de maatschappij wat rustiger aan zou doen, het een betere maatschappij zou zijn. Je kunt dan te laat komen om het goede voorbeeld te geven. Je kan ook bedenken dat je werk erg belangrijk is, belangrijker dan een mogelijke boete. Er hangt veel vanaf dat je op tijd bent. Dan kun je flink op het gaspedaal trappen. Je kunt bedenken dat er teveel regels zijn in de maatschappij; het zou beter zijn als iedereen zelf mocht weten hoe hard hij rijdt. Je negeert de limiet zonder zorgen.
Hoewel de reorganisatie random is, is deze wel ingebed in het geheel van controlesystemen. In bovenstaand voorbeeld, zou je vanuit een wereldbeeld (level 11) waarin je vindt dat mensen zich verantwoordelijk moeten gedragen, niet snel besluiten de wet te overtreden. Dat zou immers een conflict opleveren op het hogere niveau, waarna je opnieuw zou moeten reorganiseren. De percepties waar je op uitkomt, en daarmee het gedrag dat je uiteindelijk laat zien, zijn dus voor een deel willekeurig, maar worden beperkt door wat fysiek mogelijk is en wat volgens je eigen interne organisatie wenselijk is.
Als reorganisatie niet plaatsvindt of niet mogelijk is, blijft het conflict bestaan en kan er een toestand zijn van chronische error. Een gedeelte van het controlesysteem functioneert niet goed en er is voortdurende stress in het systeem. Dit kan zich uiten in allerlei symptomen die we kennen uit de psychiatrie: angst, depressie en burnout kun je begrijpen als een controlesysteem in conflict. Ook psychose en dissociatie kunnen we leren begrijpen in termen van perceptuele controle.
Samenvatting theorie
In het bovenstaande stuk is de Perceptual Control Theory gepresenteerd als een veelomvattende theorie die kan verklaren hoe mensen en alle andere levende wezens functioneren. De kern van de theorie is dat gedrag de controle is van perceptie: we zorgen er met ons gedrag voor dat we de wereld zo veel mogelijk ervaren zoals we deze willen ervaren. Dat we dit kunnen, is overal om ons heen te zien: we hebben controle. Als ik deze zin opschrijf, dan volgt het ene woord op het andere woord, in de volgorde juiste. Op het moment dat deze waarneming niet strookt met de referentiewaarde, de volgorde waarin woorden horen te staan, ervaar je error. Staat het er nou echt, “in de volgorde juiste”? Het ene woord volgt op het andere woord, in de juiste volgorde. Error – een afwijking – trekt de aandacht, zoals je merkt.
Gedrag van mensen kun je met PCT begrijpen als een manier om controle te houden over een bepaalde perceptuele variabele. Gedrag wordt niet veroorzaakt door een stimulus van buiten of door het uitvoeren van een plan van binnen: gedrag vindt plaats binnen een feedback-loop en is gericht op het instandhouden, het controleren, van een bepaalde toestand. Controle vindt plaats in een hiërarchie van controlesystemen, waarin percepties op verschillende niveaus op verschillende manieren worden opgebouwd uit basale, neurale signalen. Op het moment dat er een conflict is, en daarmee chronische error, treedt een reorganisatiesysteem in werking waardoor de controle wordt hersteld. Blijvende error kan je afhankelijk van de context ook vertalen in emotie: angst als je de controle dreigt te verliezen, depressie als het terugvinden van controle onmogelijk lijkt.
Paradigmawisseling
Op het moment dat je in de psychologie de Perceptual Control Theory gaat zien als een functionele theorie waarin duidelijk wordt hoe mensen en andere organismen werken, dan is er sprake van een paradigmawisseling. Van het paradigma van lineaire causaliteit ga je over naar een circulaire causaliteit, waarin oorzaak en gevolg niet te onderscheiden zijn in de tijd. Waarin oorzaken intern zijn en verstoringen extern. Waarin interactie tussen persoon en omgeving betekenis krijgt in een functioneel (en toetsbaar) model. Waarin de statistiek zoals we die kennen, met

afhankelijke en onafhankelijke variabelen, niet blijkt te passen bij hoe gedrag tot stand komt en daarmee altijd tekortschiet (Carey e.a., 2017; Mansell & Huddy, 2018). Veel voorkomende gezegden als grip krijgen, de balans herstellen, controle hervinden, zelfvertrouwen ontwikkelen, kunnen in PCT een theoretisch onderbouwde betekenis krijgen. De focus op perceptie in plaats van op gedrag betekent dat het nodig is om van positie te veranderen: truth is in the eye of the beholder – je moet het bekijken vanuit het perspectief van het individu, niet vanuit het perspectief van de buitenstaander. Een gemiddelde perceptie (zoals die van een groep proefpersonen) heeft geen betekenis; vanuit PCT kijk je naar het individu en hoe deze zelf functioneert. Je vraagt naar de doelen, wensen, behoeften en verlangens om een beeld te krijgen van de referentiewaarden. Je vraagt naar ervaringen, beleving, gedachten, beelden in het hier-en-nu om een idee te krijgen van de perceptie. Je vraagt naar gevoelens, pijn, onrust om een idee te krijgen van waar de error zit. Je vraagt naar wat belangrijk is in de omgeving om te weten welke variabelen iemand controleert. Deze benadering is ook uitgangspunt van de Method of Levels (MOL), een transdiagnostische therapiemethode die gebaseerd is op PCT (Alsawy, Mansell, Carey, McEvoy, & Tai, 2014; Mansell, 2008).
Kun je dan niets meer met gedrag? Jawel, gedrag is handig omdat het zichtbaar is. Je kunt iets veranderen in de omgeving en kijken of iemand reageert. Dit noemt men in PCT de Test for the Controlled Variable (Marken, 2013; Marken & Mansell, 2013). Zoals het voorbeeld met de verkeerde woordvolgorde: als je daarop reageert, dan weet je dat woordvolgorde belangrijk voor je is. Als ik wil weten of de bestuurder achter me de afstand tot mijn auto controleert, dan kan ik vertragen en kijken of hij ook langzamer gaat rijden. Op het moment dat er iets verandert in de omgeving (ik rem) en de perceptie (van de persoon waar het om gaat) blijft gelijk (de afstand tussen onze auto’s blijft gelijk), dan weet je dat er controle is. Door verstoringen krijg je een idee van wat er gecontroleerd wordt. Op het moment dat er niets verandert, dan is er controle. Verandert er wel iets, dan kán het zijn dat er geen controle is. Het kan zijn dat de verstoring te groot is en controle niet mogelijk is. Het kan zijn dat de nieuwe toestand de gewenste toestand is. Levende wezens controleren en reageren op verstoringen van wat ze belangrijk vinden: ze zorgen dat hun toestand is zoals ze willen dat deze is.
Met dank aan kritische meelezers: Ger Schurink, Mark Hommes, Susanne Verschuren.
Referenties
Alsawy, S., Mansell, W., Carey, T. A., McEvoy, P., & Tai, S. J. (2014). Science and Practice of Transdiagnostic CBT: A Perceptual Control Theory (PCT) Approach. International Journal of Cognitive Therapy, 7(4), 334–359. https://doi.org/10.1521/ijct.2014.7.4.334
Bourbon, W. T., & Powers, W. T. (1999). Models and their worlds. International Journal of Human-Computer Studies, 50(6), 445–461. https://doi.org/10.1006/ijhc.1998.0263
Carey, T. A., Tai, S. J., Mansell, W., Huddy, V., Griffiths, R., & Marken, R. S. (2017). Improving professional psychological practice through an increased repertoire of research methodologies: Illustrated by the development of MOL. Professional Psychology: Research and Practice, 48(3), 175–182. https://doi.org/10.1037/pro0000132
Cuijpers, P., Karyotaki, E., Reijnders, M., & Ebert, D. D. (2019). Was Eysenck right after all? A reassessment of the effects of psychotherapy for adult depression. Epidemiology and Psychiatric Sciences, 28(1), 21–30. https://doi.org/10.1017/S2045796018000057
Forssell, D. (2016). Perceptual Control Theory – a book of readings.
Hofmann, S. G., & Hayes, S. C. (2019). The Future of Intervention Science: Process-Based Therapy. Clinical Psychological Science, 7(1), 37–50. https://doi.org/10.1177/2167702618772296
Luborsky, L., Rosenthal, R., Diguer, L., Andrusyna, T. P., Berman, J. S., Levitt, J. T., … Krause, E. D. (2002). The Dodo Bird Verdict Is Alive and Well—Mostly. Clinical Psychology: Science and Practice, 9(1), 2–12. https://doi.org/10.1093/clipsy.9.1.2
Mansell, W. (2008). Perceptual Control Theory as an integrative framework and Method of Levels as a cognitive therapy: what are the pros and cons? The Cognitive Behaviour Therapist, 2(03). https://doi.org/10.1017/s1754470x08000093
Mansell, W., & Carey, T. A. (2015). A perceptual control revolution? Psychologist, 28(11), 896–899. https://doi.org/10.1080/10459881003744552
Mansell, W., Curtis, A., & Zink, S. (2019). Observers fail to detect that behavior is the control of perception: A computer demonstration of unintended writing. Journal of Experimental Psychology. General. https://doi.org/10.1037/xge0000590
Mansell, W., & Huddy, V. (2018). The assessment and modeling of perceptual control: A transformation in research methodology to address the replication crisis. Review of General Psychology, 22(3), 305–320. https://doi.org/10.1037/gpr0000147
Marken, R. S. (2013). Making Inferences about Intention: Perceptual Control Theory as a “Theory of Mind” for Psychologists. Psychological Reports, 113(1), 257–274. https://doi.org/10.2466/03.49.PR0.113x14z0
Marken, R. S., & Mansell, W. (2013). Perceptual control as a unifying concept in psychology. Review of General Psychology, 17(2), 190–195. https://doi.org/10.1037/a0032933
Powers, W. T. (1973). Behavior: The control of perception. Aldine Chicago.
Runkel, P. J. (2003). People as Living Things: The Psychology of Perceptual Control. Living Control Systems Publ.
Yong, E. (2012). Replication studies: Bad copy. Nature News, 485(7398), 298. https://doi.org/10.1038/485298a
Young, R. (2017). A General Architecture for Robotics Systems: A Perception-Based Approach to Artificial Life. Artificial Life, 23(2), 236–286. https://doi.org/10.1162/ARTL_a_00229